По образу и подобию. Нужно ли делать роботов похожими на нас?
«Совершенных роботов все-таки не бывает. Этим они похожи на людей»
Роман Арбитман. Поединок крысы с мечтой
РУБРИКТОР
[1] Введение
[2] Неловкий новый мир 2.1. Андроиды первой половины XX века 2.2. Андроиды второй половины XX века 2.3. Андроиды в начале XXI веков [3] Эмпатия к не-человеку 3.1. Теория о миловидности 3.2. Роботы, которые нам нравятся 3.3. Принцип асимметрии
[4] Заключение
Библиография Источники изображений
[1] ВВЕДЕНИЕ
Люди любят себя. Люди любят находить себе подобное в окружающем мире, что проявляется в таких явлениях, как парейдолия (зрительная иллюзия, при которой человек видит лица в случайных неодушевленных предметах, лиц не подразумевающих). Люди любят воспроизводить себя. Нам интересно изучать себя и совершенствовать. Антропоморфные роботы являются логичным продолжением этого изучения — а что, если создать кого-то по своему образу и подобию?
А что, если создать кого-то, кто будет превосходить человека по интеллектуальному и физическому потенциалу? Сверхчеловека по Ницше оказалось легче реализовать в Сверхроботе, а не в себе. Мы успешно внедряем роботизацию в производство и быт, но самыми интересными для технооптимистов среди инженеров и обывателей остается совершенствование андроидов, причем как виртуальнных — все мы были свидетелями всплеска ИИ-технологий в последние несколько лет, — так и физических, хотя гуманоидные роботы, отвечающие за человеческое тело, даже произведенные компанией Tesla, и отстают от своих бесплотных собратьев, отвечающих за человеческие мозги и сердца.
Мы хотим воссоздать себя, создав нечто совершенно иное.
А что, если роботу, который походит на нас и превосходит нас, в самую последнюю очередь нужно повторять строение нашего скелета, мышечных креплений и кожных покровов? Наши тела — это, одновременно, и наше ограничение, и наша сила. Из двух интерпретаций — «мозги на лапках» или слитый воедино организм, — мне ближе вторая: наша биологическая сущность, наше тело и материя и наше сознанием слиты воедино. Тело является источником гомеостаза, квиэнтессенцией которого является сознание (эти положения подробно раскрываются в работе американского нейробиолога Антонио Дамасио «Странный порядок вещей», а в контексте роботов и ИИ — в работе Гаспара Кенига «Конец индивидуума», конкретно в главе «Не бывает сверхинтеллекта без сверхорганизма», из которой я и позаимствовала формулировки «сверх-»). Поэтому, на мой взгляд, попытки воспроизвести плоть и кровь человека в том формате, в котором инженеры пытаются это делать сейчас, также малоперспективны в контексте создания кого-то, превосходящего человека, как и попытка воссоздать сознание и тело по отдельности.
В этом исследовании, анализируя дизайн и следующее из него «поведение» андроидов, мне бы хотелось раскрыть противоречие между целью — создать существо, превосходящее человека, — и средством: тщательным воспроизведением биологического существа в пластике, металле и чипах, в надежде, что это даст нужный результат. Пытаться создать робота, с формальной точки зрения максимально подобного человеку, значит заведомо ограничивать возможности создания Сверхсущества. Человеческая плоть ограничена, но органична сама себе, своей природе, своему материалу. Ее переложение на искусственное сырье лишь усиливает ограничения человеческой формы, а не устраняет их.
Пример ненужности полного человекоподобия: люди с ампутацией рук для восстановления повседневной функциональности предпочитают не те протезы, что копируют человеческие кисти, а те, что похожи на клешни, так как кистеобразные бионические протезы никогда не бывают действительно похожими по спектру функционала на настоящие руки. В таком материале человеческая рука практически полностью теряет свою полезность, и тем более оказывается неспособна превосходить человеческие руки из плоти и крови.
Робот Сбера представляет свой танец на 10й Международной конференции AI Journey. Видео: РИА Новости
Слишком антропоморфная техника, как только перестает быть неподвижной, часто вызывает чувство неловкости, смех, эффект зловещей долины. С одной стороны, можно было бы пенять на недостаточно умелых программистов, но все же код контактирует с миром через материал, а материалом управляет дизайнер. Что же не так с дизайном андроидов? Насколько тщательно мы должны копировать человеческий облик?
В первой части исследования мы посмотрим на местами забавные примеры взаимодействия андроида и человека, а во второй — рассмотрим альтернативные способы сохранять эмоциональный контакт между человеком и роботом и при этом не ударяться в антропоморфизм. И еще поймем, насколько вообще компаниям, бизнесменам, изобретателям и человечеству нужно стремиться к созданию пресловутого Сверхчеловека. Может, роботы нужны для другого. Может, дело в том, что ни сам человек, ни существа, похожие на него, просто никогда не смогут стать совершенными?
[2] НЕЛОВКИЙ НОВЫЙ МИР
2.1 Андроиды первой половины XX века
Для начала проясним, что будем считать андроидами (забавно, что сначала я написала «кого будем считать»).Так как в визуальном исследовании я рассматриваю противоречия внутри задачи максимально приблизить робота к человеку по функциям и внешнему виду, а затем и сделать его превосходящим, то и рассматривать андроидов я считаю целесообразным начиная с момента, когда антропоморфный дизайн стали создавать не ради маскировки механизма под что-то знакомое, а для попытки воспроизведения человека.
В этом смысле первым андроидом можно считать робота Эрика, созданного капитаном, инженером-автомобилестроителем Уильямом Х. Ричардсом в 1928 году.
Робот Эрик. Уильям Х. Ричардс, 1928
20 сентября 1928 года этот робот открыл выставку Общества инженеров-моделистов в Лондоне вместо принца Альберта, герцога Йоркского. В Королевском садоводческом зале Эрик встал, поклонился, посмотрел направо, налево и с соответствующими жестами приступил к произнесению четырехминутной вступительной речи. Движение и функция определяли форму, а не наоборот. Туловище у Эрика — это корпус для размещения агрегатов, а «человеческость» — лишь тонкая поверхностная метафора. Внешне робот напоминал больше Железного Дровосека, чем человека, однако в контексте своего времени, безусловно, производил сильное впечатление даже на инженеров: в 1920-е годы сам факт имитации человеческого поведения при такой низкой степени формоподобия казался прорывом.
1. Гакутенсоку. Макото Нисимура, 1928 — первый японский робот. 2. Руперт I. Британские школьники, 1928 — механическая модель основных органов человека. 3. Телевокс. Юджин Вендлинг, 1930 — шуточный.
Гакутенсоку, Руперт I & II и Телевокс — одни из первых экспериментов конца 1920-х — начала 1930-х годов с человекоподобными механизмами наряду с Эриком.
Дизайн и конструкция Гакутенсоку выражала человеческое черезспособность проявлять эмоции и писать (язык — наша особенность); также его лицо и одежда были проработаны крайне хорошо, учитывая технические ограничения. Руперты I & II, вероятно созданные школьниками из Британии, демонстрировали работу человеческого тела — как парадоксально, что нереалистичный дизайн искусственных органов использовался для изучения самих себя. Телевокс развлекал публику инсценировкой выстрела, заменяя актера на сцене — юмор создавался на контрасте эмоционального поведения и абсолютно отдаленного от человека внешнего вида.
Электро. Джозеф М. Барнетт, Westinghouse Electric, 1937 Робот с самым большим «мозгом» на Всемирной выставке 1939 года. По факту был эффектной рекламой для электротехнических приборов компании.
«Дамы и господа, я буду очень рад рассказать свою историю. Я умный малый, ведь у меня очень хороший мозг из 48 электрических реле»
— Робот Электро
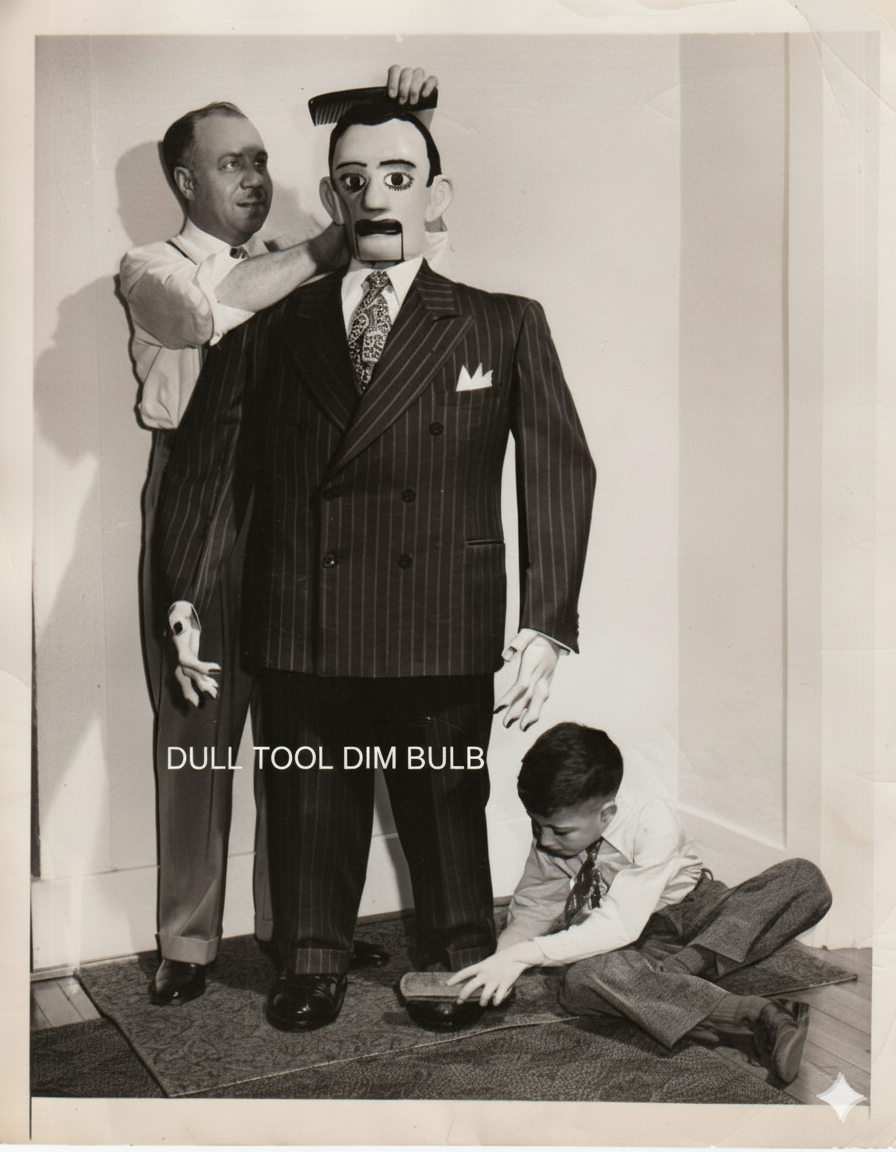

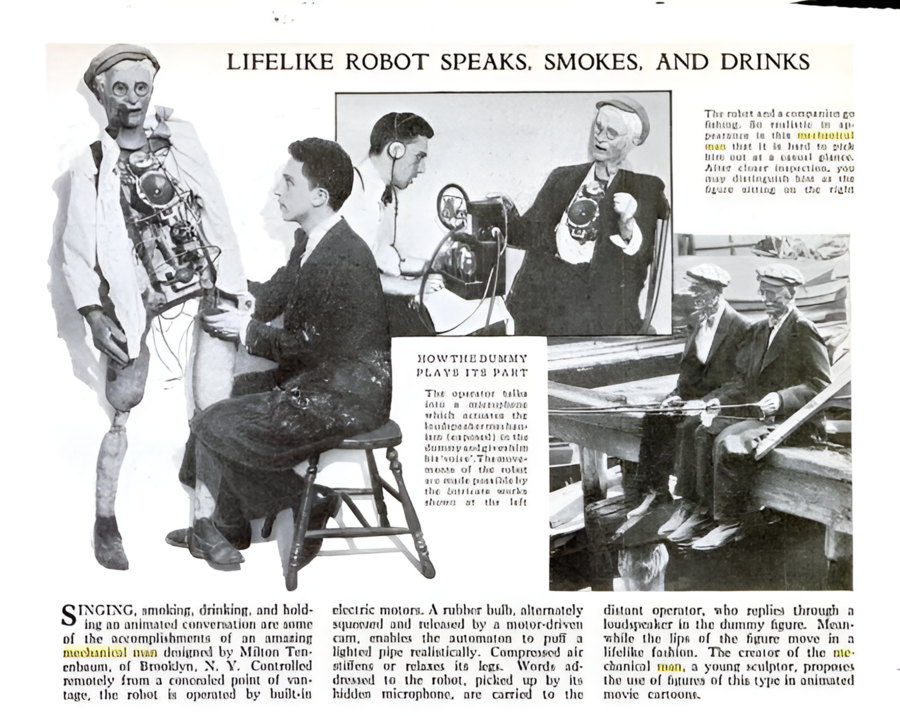
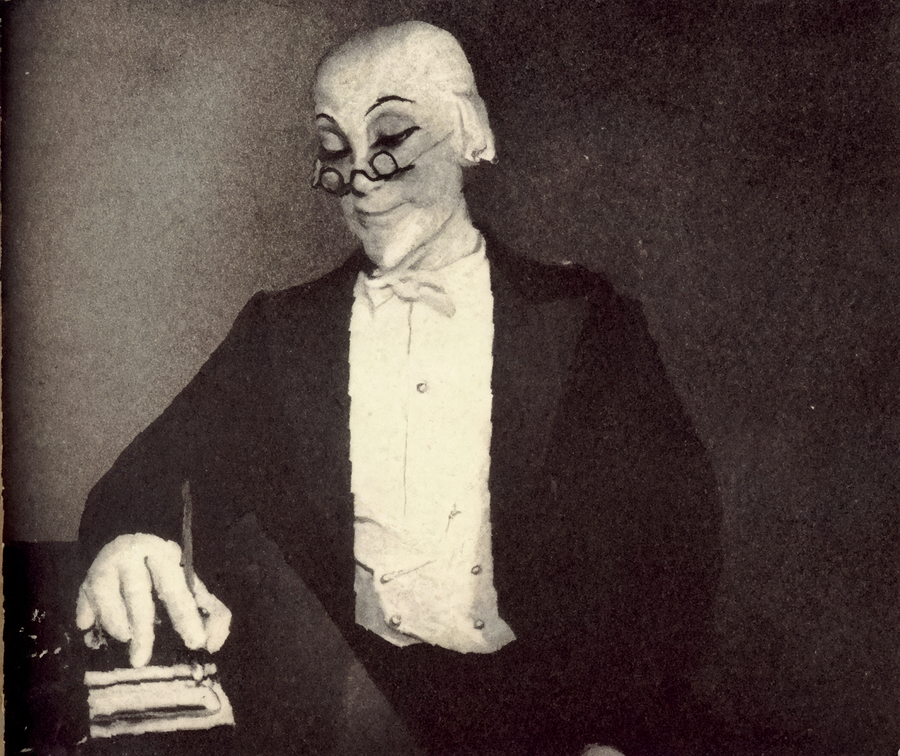
1. Робот Вилли. Эндрю Бобер, 1933 2. Реалистичный робот. Милтон Тененбаум 1935 3. Профессор Аркадий. Дюран и Декан, 1937 4. Робот Робин. Патрик Риццо, 1948
Помимо «Железных дровосеков», создавали также дизайн андроидов, насколько это возможно в виду ограничений в материалах и технологиях того времени подражающий человеку, что приводило скорее к жутковатому эффекту. Их облачали в социальные роли: приятель (который может покурить и поболтать за компанию), местный пьяница (который посидит с тобой на рыбалке), интеллигент (который каллиграфически напишет ответ на ваши вопросы), дворецкий (который заменит живого слугу) — существ, которых стремились очеловечить, тем не менее старались наделить функцией, пусть и социальной. Эдакие двойники.
GARCO — американский робот-оператор от Harvey G. Chapman Jr., созданный в 1953 году как демонстрация автоматизации и послевоенной промышленной эффективности. Его конструкция — пример «робо-организма»: система, в которой части тела воспроизводят человеческие функции и пропорции, но не человеческую эстетику, этим он более интересен, чем «дровосеки».
Корпус выполнен из металлических панелей с подчёркнутой техничностью: угловатые формы, открытые шарниры, крупные крепления. Руки сконструированы по аналогии с человеческими конечностями — плечевой поворот, локтевой изгиб, хват — но в визуальном смысле остаются чисто механическими, без попытки создать кожу, мышцы или правдоподобные контуры. Голова — плоский «блок управления» с упрощёнными «глазами»-индикаторами, решённая как интерфейс, а не лицо.
Garco демонстрирует ранний этап индустриального антропоморфизма: функциональная мимика человека без эстетического подобия. Его образ показывает стремление сконструировать тело-инструмент, а не тело-персону, и формирует принципиально иной тип эмпатии — не эмоциональную, а операционную, основанную на считывании намерений через понятную механику движений.
Все эти объекты показывают, что в первой половине XX века человек решал две дизайнерские задачи:
1. Механическое уподобление — сделать жесты и движения, похожие на человеческие. 2. Перцептивное уподобление — создать иллюзию личности, эмоций, намерений, сымитировать человеческое поведение.
Но между формой и функцией существовала непримиримая пропасть: материалы, актуаторы и системы управления не позволяли приблизиться к человеческой пластике, а потому дизайнеры и инженеры выбирали путь игрушечного подобия.
Поэтому публика — и часто сами создатели — воспринимали эти устройства как развлечения. Они не были инструментами, но и не были людьми; они были первыми попытками промышленного дизайна человеческого поведения, предтечей будущих андроидов.
2.2 Андроиды второй половины XX века
Гайган/Цыган/Мистер Мото (Gygan). Пьеро Фиорито, 1957
Гайган (Цыган) — пример раннего отказа от буквальной антропоморфности в пользу функциональности. Его конструкция остаётся формально гуманоидной — голова, торс, руки, ноги — но каждая часть тела спроектирована не как подделка человека, а как элемент робо-организма. Вместо попытки воспроизвести человеческую кисть инженеры выбирают клешню-манипулятор, оптимизированную под захват и сжатие. Лицо Гайгана также уходит от миметики: огромная фара выполняет роль глаз, динамик — роль рта, превращая голову в интерфейс, который работает через затрагивание нашего желания видеть везде лица (парейдолию), а не через имитацию.
R.O.S.A.B.O.S.S.O.M. Брюс Лейси, 1965
R.O.S.A. B.O.S.O.M. визуально совершенно не похожа на женщину: скорее на короб с проводами на колесах, и только губы шутливо намекают на ее идентичность. Это очень контрастный пример андроида: здесь не стольо дизайн наделяет робота человеческими чертами, сколько сам человек, создавая гендерные рамки для абсолютно не биологического, неживого предмета. Ирония достигает апогея, когда R.O.S.A побеждает на конкурсе Alternative Miss World: машина, лишённая настоящей женственности, выигрывает «мисс мира» в своей собственной «сфере».
1. АРОК (AROK). Бен Скора, 1975 2. САБОР V (SABOR V) «Орбитус». Питер Стойер, 1976
В голову роботов выше инженеры поместили реалистичные резиновые маски лица. Голова реагирует на голос, челюсть шевелится, улыбка может показаться почти живой. Этот контраст — между живым лицом и механическим каркасом — создаёт сильный эффект зловещей долины: мы одновременно видим «человека» и явно понимаем, что это — машина. Яркий пример того, как попытка смешать антропоморфизирующую часть (лицо) с утилитарной машинной формой усиливает тревогу, а не эмпатию, и ставит под вопрос, зачем нам вообще «человеческие лица» на роботах.
Кибот Мэрилин Монро. Сюнъити Мидзуно, 1982
Жуткий пример желания воссоздать человека —робот-копия умершей Мэрилин Монро (1982). Он управляется микрокомпьютером и пневматическими клапанами, что даёт около 40 выражений лица: улыбка, подмигивание, мимика — всё смоделировано для театра, шоу и коммерции. «Она» может петь, играть на гитаре, реагировать на голос — такой дизайн, хоть и показывает большой технический прогресс, обесценивает и объективизирует некогда настоящую женщину.
Почему мы создаём робота, полностью повторяющего умершего человека? Машинное воспроизведение знаменитости превращает её в бессмертную куклу, объект желания и ностальгии. Автор, Шунити Мизуно, заявляет, что стремится приблизить машину к человеку через эротизацию кибернетики, и как результат мы получааем псевдовоскрешение легенды, наполненное тревогой и гиперреализмом.
Вабот-2 (Wabot-2). Университет Васеда, 1980е
Кисть человека, столь изящная и функциональная в плоти, в приводах и металле теряет свои ключевые свойства: гибкость, скорость реакции, точность мелких движений. Любая попытка воспроизвести суставы, сухожилия и хватальные стратегии человека приводит к громоздкости, снижению надежности и неловкости манипуляций. Роботические руки становятся скорее украшением, чем инструментом для реальной работы, и демонстрируют фундаментальный конфликт между эстетикой и функциональностью в дизайне антропоморфных механизмов.
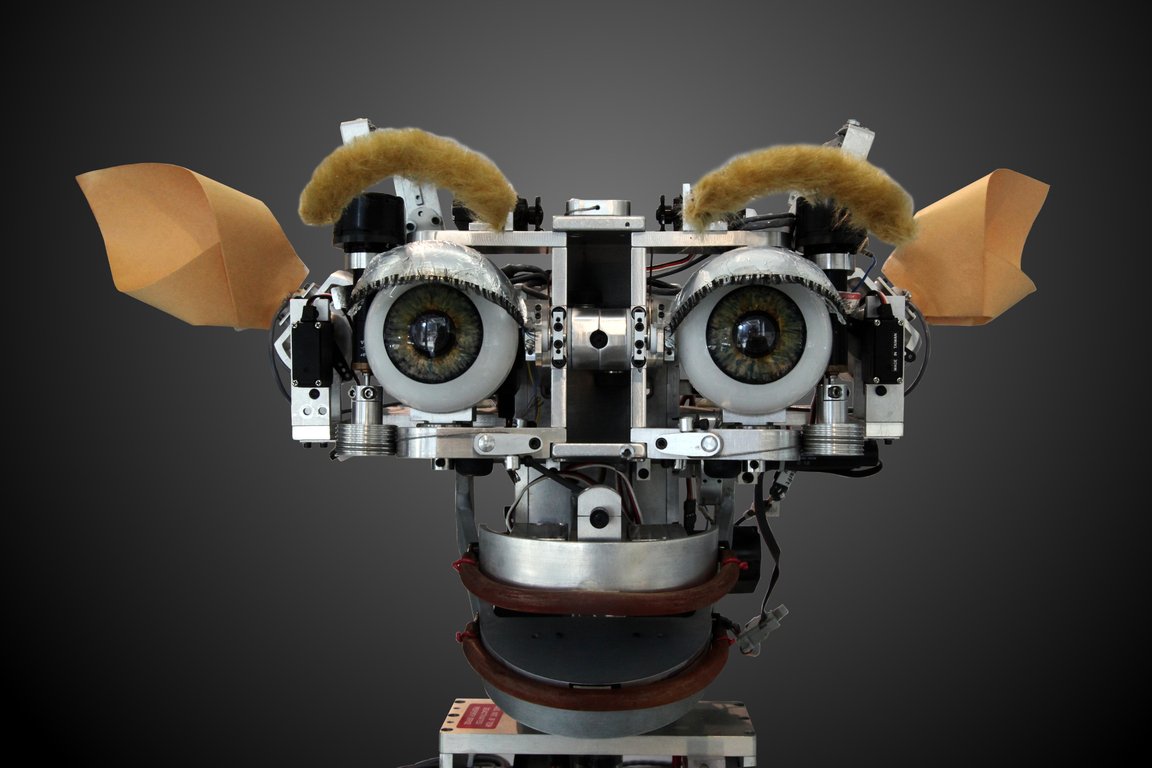
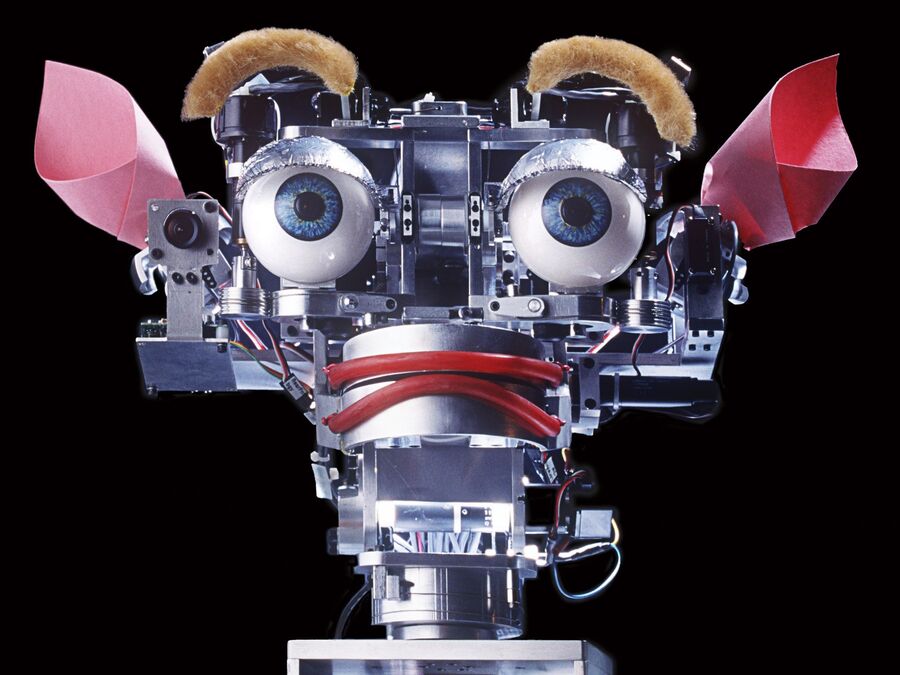
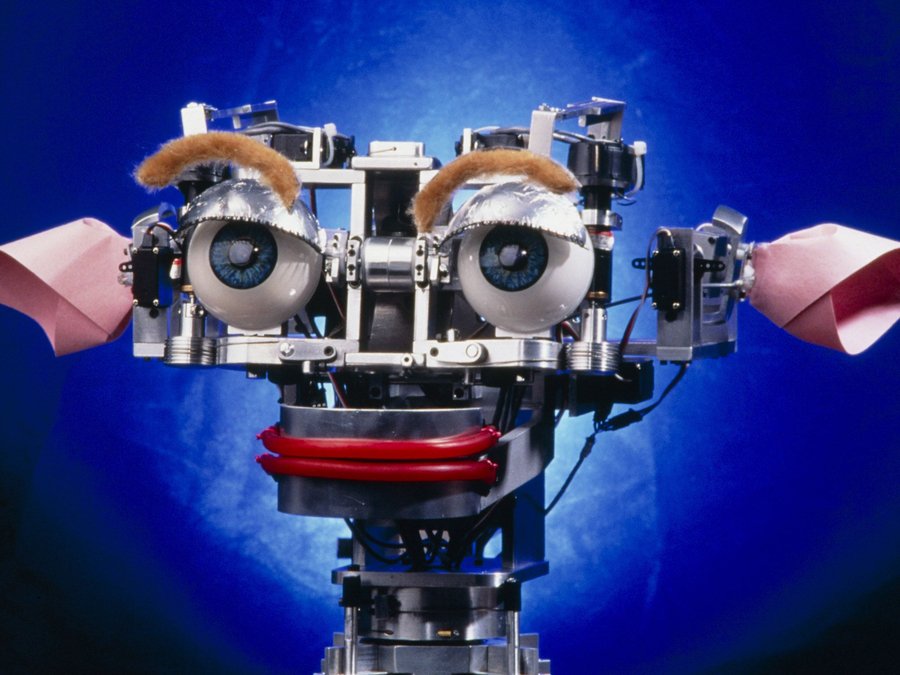
Кисмет (Kismet). Синтия Бризил, 1990е
Кисмет, созданный в MIT в 1990х год Синтией Бризил и командой, стал одним из первых роботов, чьи выражения лица и мимика создавались с явной целью коммуникации. Он не ходил и не выполнял физические действия, зато каждая мышца «лица» была продумана для передачи эмоций, изучения реакций человека и проверки границ социального взаимодействия. С одной стороны, это был прорыв в области эмоциональной робототехники, с другой — пример того, как антропоморфизм концентрируется на внешних сигналах, а не на целесообразных механических возможностях робота.
Движения лица Кисмет часто кажутся комичными, слегка преувеличенными и лишёнными органической плавности. Неловкость робота подчёркивает важный момент: воспроизведение биологического выражения эмоций в искусственном материале всегда ограничено свойствами механизмов и приводов. Несмотря на тщательную проработку пропорций и скоростей, робот остаётся «кукольным» — его эмоции читаются, но не «живут» в теле. В этом смысле Кисмет демонстрирует, что даже в социальных андроидах физическая органичность и материальность в дизайне ограничивают попытки создать «человеческую» полноту поведения.
Мэнни. Battelle Pacific Northwest, 1988 Он даже потеет.
«В окончательном виде манекен будет физически напоминать человеческое тело по размерам, геометрии конечностей и туловища. Он сможет имитировать сложные движения и позы тела, дыхание, температуру тела и кожи, потоотделение…»
— Дэвид В. Беннетт, Центра прикладной физики Баттелла
Мэнни можно рассматривать как один из немногих примеров, когда уподобление робота человеку имеет смысл: робота планировалось использовать для испытаний защитной одежды на полигонах в опасных, «а, возможно, и адских» (Manny Robot Mannequin (American)) условиях для человека.


1. Honda серия E. 1986–1993 годы 2. Honda серия P. 1993–2000 годы
Роботы Honda серии E в конце 1980-х годов служили изучению шагов, баланса, пробовали повторять ходьбу, которую мы считаем естественной, но которая на самом деле крайне сложна для механизма. Частичное воспроизводство человека (нижние конечности) нужно б
В следующей серии P, уже в 1990-е, андроиды конструируются уже из всех «частей тела», не только ног. Они двигаются свободнее, ступени перестают быть препятствием, появляется плавность. Дизайн корпуса с минимальными деталями подчеркивал технологичность, но форма оставалась антропоморфной: голова, туловище, руки, ноги. Инженеры пытаются заново изобрести механику человеческого тела, но проблема в том, что форма всё ещё ограничивает возможности робота.
Honda P демонстрирует ключевое противоречие: чем ближе робот к человеческой форме, тем сильнее ограничения движения и возможностей. Выглядя почти как человек, он всё ещё не может воспроизвести ни силу, ни скорость, ни гибкость настоящего тела. В рамках промышленного дизайна это наглядный пример того, как эстетика и форма накладывают ограничения на функцию, и как каждая деталь — от пропорций ног до изгибов корпуса — формирует визуальное впечатление о роботах, одновременно подчёркивая их человеческую и не-человеческую природу.
Уже в 90х люди больше сосредоточились на изучении механики движения, футуристичном дизайне и создании максимально продвинутых андроидов не для потехи, а для прогресса.
2.2 Андроиды начала XXI века
АСИМО (ASIMO). Honda, 2000 Робот АСИМО стал апогеем экспериментов с предыдущими сериями и дебютным образцом полноценного гуманоидного робота.
В XXI веке кинетика андроидов становится более плавной и естественной благодаря совершенствования приводных механизмов, сочленений и материалов, а их внешний вид — более гладким, литым и футуристичным. Нужно меньше громоздких «органов», а потому дизайн корпуса становится аккуратнее. Роботов пытаются научить плавно ходить, танцевать брейкданс, пользоваться пальцами и кистями рук. И у них это неплохо получается… для машин.
«Мужской» (слева) и «женский» (справа) роботы Optima от компании Tesla стараются рейвить
Одна из версий робота Atlas от Boston Dynamics демонстрирует гимнастические навыки
Как бы плавно и близко к естественности ни двигался робот, его движения всегда ограничены формой, материалами и механизмами, которые его составляют. Каждое сгибание, каждый шаг — не свобода, а компромисс между инженерной возможностью и попыткой имитировать биологию. Андроид может казаться грациозным, почти живым, но это иллюзия: за внешней гармонией скрываются жёсткие суставы, фиксированные углы, ограничения (не технологией, а именно формой) скорости и силы. То, что в человеке является результатом миллионов лет эволюции и отточенного симбиоза клеток, в андроиде остаётся синтетическим набором движущихся деталей.
Попытка повторить человеческую форму и движения превращает робота в заключённого собственной оболочки. Его потенциал — будь то скорость, сила, выносливость или гибкость — срезан рамками человеческого тела: каждый мускул, каждый сустав, каждый пропорциональный элемент диктует пределы, которые робот не может превзойти, оставаясь «человеческим». Сверхробот, созданный по образу человека, вынужден подчиняться тем же ограничениям, что и органическое тело, а значит, его возможности никогда не раскроются в полной мере. И именно здесь проявляется ключевое противоречие: чем точнее мы копируем человека, тем меньше свободы оставляем синтетической сущности.
В этой главе мы провели анализ антропоморфных роботов XX–XXI веков и их физической неловкости. Мы видим, что основные проблемы механики андроидов, даже с развитием технологий, сохраняются:
1. Пропорции человеческого тела не оптимальны для механики: плечи, локти, колени, пальцы — сложные сочленения, которые трудно повторить в металле и пластике. 2. Сложность передачи естественной гибкости и диапазона движений: шаг, поворот головы, хватание предметов. 3. Перенос органических форм на жёсткую или полужёсткую конструкцию часто приводит к «застывшим» или неловким движениям. 4. Проблемы с балансом — человеческий баланс основан на мышцах и сенсорной обратной связи, что крайне сложно воспроизвести в приводах и датчиках. 5. Электродвигатели и пневматика не дают плавной, «органичной» динамики: сенсоры часто не успевают корректировать движение в реальном времени, поэтому робот выглядит неловко. 6. Слишком человекоподобное движение, которое ещё не полностью органично, воспринимается как неловкое, странное или пугающее. 7. Ограничения механики напрямую создают визуальные и эмоциональные эффекты: движения слишком медленные, отрывистые, неестественные.
Воспроизведение органичной биологии в металле и пластике усиливают ограничения человеческой формы, а не снимают их. За исключением узких областей — испытаний, где робот заменяет человека — строгий антропоморфизм не нужен. Робот не способен точно воспроизвести физические особенности тела, и любые попытки имитировать мышцы, кожу или походку лишь создают эффект неловкой имитации. С точки зрения дизайна, материал и форма должны подчиняться задачам, адекватным машине, а не человеку.
Эта мысль выводит нас к следующей теме: как вызывать эмпатию к роботам, не привязываясь к человеческому облику? В следующей главе, «Эмпатия к не-человеку», мы посмотрим на альтернативные стратегии визуального и поведенческого дизайна: как роботы могут быть эмоционально привлекательны, вызывая симпатию и доверие, оставаясь при этом собой. Мы попробуем понять, каким может быть робот будущего без ловушки антропоморфизма.
[3] ЭМПАТИЯ К НЕ-ЧЕЛОВЕКУ
«Мы смеемся и плачем над R2-D2, но к нему не нужно пришпиливать глаза изестной фотомодели или мускулы Шварцнегера»
Гаспар Кениг. Конец индивидуума
3.1 Теория о миловидности
Примеры выше показали, что нам, возможно, стоит на секунду задуматься о том, чтобы отказаться от очевидного пути — от попытки сделать роботов похожими на нас. Забавно, но чем настойчивее инженеры и дизайнеры стремятся приблизить форму робота к человеческой, тем быстрее он теряет главное, ради чего всё это делается, — возможность вызывать у нас естественную эмпатию.
И здесь мы можем вспомнить теорию о миловидности австрийского зоолога Конрада Лоренца. Она предлагает иной маршрут: не копировать человека, а работать с врождёнными механизмами восприятия, которые заставляют нас реагировать на определённые пропорции, текстуры и движения как на «безопасное» и «нуждающееся в заботе».
Самый яркий пример не антропоморфного, самодостаточного дизайна робота в культуре, который вызывает сочувствие — ВАЛЛИ-И из одноименного м/ф Pixar
Это важный момент для дизайна. Миловидность — это инструмент, который позволяет конструировать эмоциональную доступность робота без обязательств перед анатомией человека. Робот может быть совершенно далёк от антропоморфной формы — дисковым, цилиндрическим, шарообразным, вообще абстрактным — но его пропорции, округлость, мягкая кинематика и отсутствие резких углов включают те же паттерны восприятия, что и взгляд на детёныша.
Проще говоря: эмпатия удерживается не копированием человека, а активацией глубинных реакций на форму. Эта глава как раз о том, как дизайнер может работать с миловидностью как с визуальной стратегией — чтобы создавать объекты, которые не претендуют на человечность, но при этом остаются для нас эмоционально «своими».
3.2 Роботы, которые нам нравятся
Робот Cozmo — яркий пример того, как робот может вызывать сильную эмпатию, не прибегая к имитации человеческого облика. Миниатюрный кубический корпус, большие цифровые глаза, простые моторные жесты — всё это создаёт «живой» характер без необходимости воспроизводить руки, ноги или мимику человека. Его миловидность исходит не из подражания биологии, а из визуальных и поведенческих сигналов, которые люди интуитивно читают как «эмоции»: радость, удивление, любопытство. Его «характер» и способность взаимодействовать с людьми достигаются исключительно через программируемое поведение и выразительные элементы дизайна, а не через слепое копирование человеческих пропорций. Это демонстрирует ключевое противоречие антропоморфизма: чтобы робот был и функционален, и эмоционально привлекательным, ему вовсе не обязательно быть похожим на человека.
«Письма от детей, написанные неловким почерком и пестрящие наивными рисунками, гордо вывешены на стенах в приемной компании: они доказывают интенсивность той связи, которая может возникнуть между Cozmo и его юными партнерами»
Гаспар Кениг. Конец индивидуума
3.3 Принцип асимметрии
Эффективность Cozmo и подобных роботов подтверждается подходом, описанным в статье Е. В. Середкиной «Философские основания прикладного антропоморфизма в социальной робототехнике». Середкина выделяет два ключевых принципа проектирования, которые здесь работают особенно явно.
Во-первых, принцип асимметрии: для успешного взаимодействия с человеком поведенческий реализм оказывается важнее высокой антропоморфности. Cozmo не копирует человеческое тело, но его движения, реакции и «эмоции» читаются интуитивно, создавая впечатление живого существа. Во-вторых, принцип согласованности: внешний облик и поведение робота должны быть синхронизированы. Несоответствие между ними вызывает эффект «зловещей долины», когда пользователь чувствует отторжение. В Cozmo визуальная миловидность и динамика движений согласованы, поэтому робот вызывает эмпатию без риска появления тревожного или неприятного впечатления.
[4] ЗАКЛЮЧЕНИЕ
Дизайнеры среды и интерьера нередко жалуются, что кермогранит — искусственный материал с прекрасными техническими свойствами, — все время копирует аболютно чуждые ему текстуры (например, дерево). Производителю кажется, что, сохраняя эстетические свойства, он позволяет использовать квази-дерево в работе, при этом как результат получая больше плюсов в износостойкости и неприхотливости. Но искусственная имитация дерева никогда не раскроет и половины преимуществ оригинального материала, и тем более не умножит их. Также как производителям керамогранита стоит оставлять этот материал самим собой и раскрывать его собственные свойства, творцам роботов стоит сосредоточиться не на копировании человека, а на создании самодостаточного объекта. Роботы — это отличный, исключительный инструмент. И в этом ключе и нужно обеспечивать им эволюцию.
«Роботы не являются ни нашими друзьями, ни нашими врагами, ни ангелами, ни демонами. Это просто инструменты»
Гаспар Кениг. Конец индивидуума
Попытка воспроизвести человека в роботе не только технически бесперспективна, но и концептуально ошибочна. Чем ближе мы подводим форму к человеческой, тем меньше у нас пространства для проектирования — мы оказываемся заложниками анатомии, мимики и ожиданий, которые сам же человек предъявляет к неживому существу.
Копирование человеческой внешности приводит к парадоксу: робот, которому приписана «кожаная» оболочка, не становится нам ближе — он просто начинает конкурировать с эталоном, с которым никогда не сможет совпасть. Наша эмпатия не усиливается, а, наоборот, ломается на несоответствиях. Каждая неестественная траектория взгляда, каждая задержка в движении, каждая несовершенная текстура — напоминание о том, что перед нами не человек, а его недостижимая задача его повторить.
Но главное даже не это. Когда мы перестаём требовать от робота быть человеком, мы наконец возвращаем ему то, чем он может быть по-настоящему ценным — инструментом. Объектом, спроектированным не под анатомию, а под задачу. Не образом «другого нас», а самостоятельной формой, которая может быть эффективной, выразительной, комфортной, даже обаятельной — но не обязана играть роль «почти человека».
Теория миловидности показывает, что эмпатия к роботу возможна без антропоморфизма. Она доказывает, что нам достаточно работать с паттернами восприятия, а не с копией человеческого тела. Технологическая объектность в этом смысле — не недостаток, а ресурс. Освобождение от человеческой формы позволяет дизайну перестать соревноваться с биологией и вернуться к тому, что он умеет лучше всего: создавать функциональные и честные объекты, которые вызывают доверие без маски, а симпатию — без имитации лица.
Нам не нужно воспроизводить человека. Нам нужно проектировать роботов как роботов.
Середкина Е. В. Философские основания прикладного антропоморфизма в социальной робототехнике // Вопросы философии. — 2018. — № 12. — С. 45–57. (дата обращения: 14.11.2025).
Дамасио А. Странный порядок вещей: тело и эмоции в формировании разума. — М.: Альпина Паблишер, 2013. — 512 с. (дата обращения: 14.11.2025).
Кенинг Г. Конец индивидуума. — М.: Лаборатория Фантастики, 2021. — 280 с. (дата обращения: 14.11.2025).
Cyberneticzoo.com. Gakutensoku — Pneumatic Writing Robot, Makoto Nishimura (1928). — Режим доступа: https://cyberneticzoo.com/robots/1928-gakutensoku-pneumatic-writing-robot-makoto-nishimura-japanese/ (дата обращения: 14.11.2025).
Cyberneticzoo.com. Rupert I & II, English Robots (1928). — Режим доступа: https://cyberneticzoo.com/robots/1928-rupert-i-ii-english/ (дата обращения: 14.11.2025).
Cyberneticzoo.com. Televox, Eugene Wendling (1930). — Режим доступа: https://cyberneticzoo.com/robots/1930-televox-eugene-wendling-swiss/ (дата обращения: 14.11.2025).
Honda Motor Co., Ltd. ASIMO: History of Humanoid Development. — Режим доступа: https://global.honda/innovation/robotics.html (дата обращения: 14.11.2025).
SoftBank Robotics. Pepper Robot — Product Information. — Режим доступа: https://www.softbankrobotics.com/emea/en/pepper (дата обращения: 14.11.2025).
Anki, Inc. Cozmo — The Official Product Page. — Режим доступа: https://www.anki.com/en-us/cozmo.html (дата обращения: 14.11.2025).
Lovot Official Website. — Режим доступа: https://groovenauts.com/lovot/ (дата обращения: 14.11.2025).
YouTube. Honda ASIMO Demonstration. — Режим доступа: https://www.youtube.com/watch?v=cpraXaw7dyc (дата обращения: 14.11.2025).
YouTube. Tesla Optimus Robot Walk Test. — Режим доступа: https://www.youtube.com/watch?v=I44_zbEwz_w (дата обращения: 14.11.2025).
YouTube. Boston Dynamics Atlas Robot. — Режим доступа: https://www.youtube.com/watch?v=DQba3FrmXTc (дата обращения: 14.11.2025).
YouTube. SoftBank Pepper Robot Interaction. — Режим доступа: https://www.youtube.com/watch?v=Z3yQHYNXPws (дата обращения: 14.11.2025).
Telegram. Видео демонстрации робототехники. — Режим доступа: https://t.me/boomers_TV/13390 (дата обращения: 14.11.2025).
Все изображения взяты с сайта: Cyberneticzoo.com. Robot Time Line. — Режим доступа: https://cyberneticzoo.com/robot-time-line/ (дата обращения: 14.11.2025).